Robot J4
Can play Connect Four by itself.
Can play Connect Four by itself.
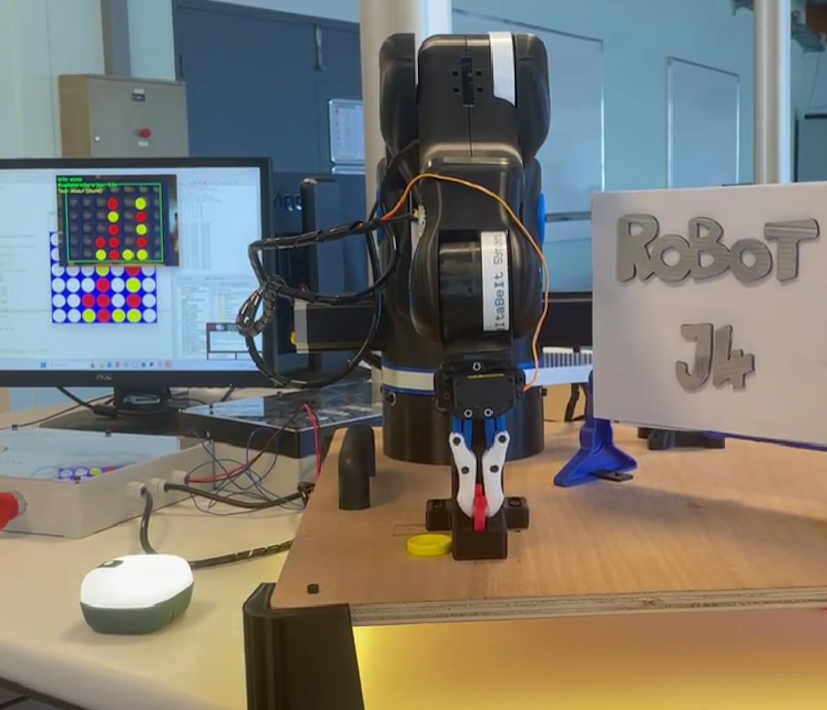
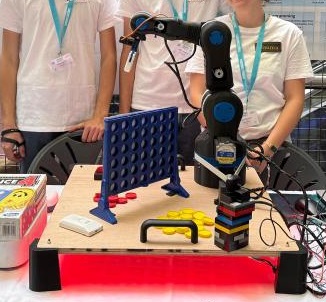
Our project features a robot arm that can play Connect Four with any human by itself thanks to a camera and an algorithm.
This project, carried out by five students from Jacques de Vaucanson High School in Tours, France, won the ‘Génialissime’ prize at the CGénial contest, earning the chance to compete at the EUCYS contest in Latvia this September.
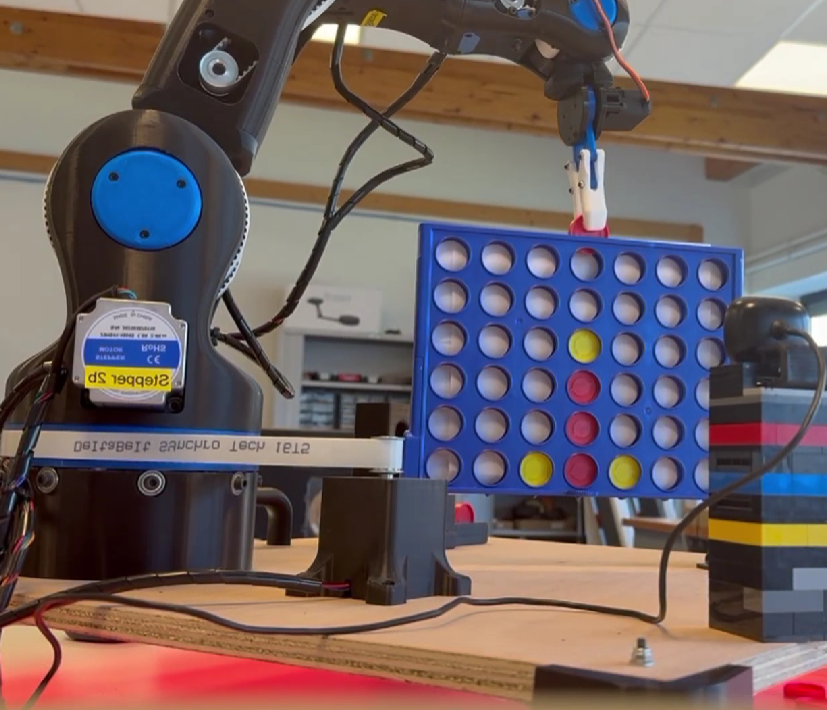

BCN3D MOVEO
The open-source robotic arm project that J4 robot is based on
you can learn more about it here.
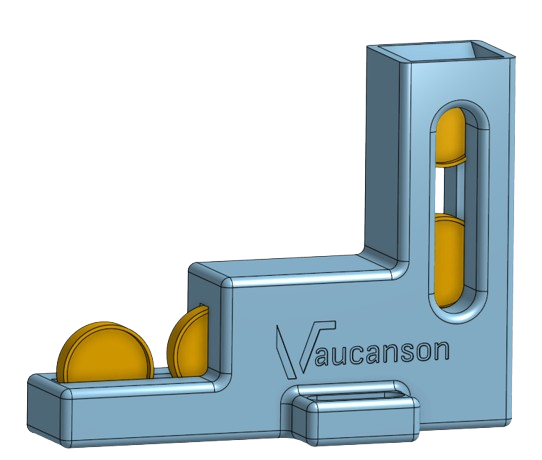
Dispenser
A dispenser we designed ourselves to hold the tokens

Raise 3D E2 3D Printer
Printed the arm and the dispenser

Microsoft LifeCam HD-3000S
Detects the game state
Raspberry Pi
Runs the main program
Arduino Mega
Controls all the motors
Stepper Motor TB6560 3A
Moves the robot arm
Python
The programming language used to code the main program

C++
The programming language used to code the program that runs on the Arduino
BCN3D MOVEO
The open-source robotic arm project that J4 robot is based on
you can learn more about it here.
Dispenser
A dispenser we designed ourselves to hold the tokens
Raise 3D E2 3D Printer
Printed the arm and the dispenser
Microsoft LifeCam HD-3000S
Detects the game state
Raspberry Pi
Runs the main program
Arduino Mega
Controls all the motors
Stepper Motor TB6560 3A
Moves the robot arm
Python
The programming language used to code the main program
C++
The programming language used to code the program that runs on the Arduino